



Product Feature
(1) Up to 45 fps data output in real time for 3D dynamic capturing;
(2) High accuracy point cloud output with 224x172 Resulation, error
< 1%;
(3) 1344x760 RGB Video output;
(4) Anti interface against strong light, applicable for wide range of environments;
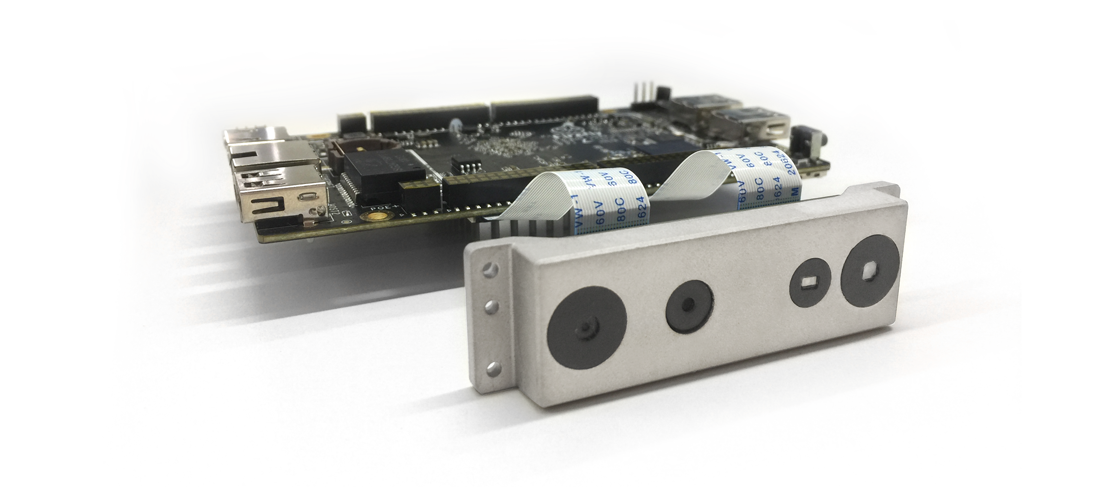
(5) Small size, low power consumption, easy to integrate;
(6) Integrated with embeded deep sensing algorithm platform, easy to call for the backend;
(7) Classified with user class I, no harm to human eye.
Specification
Depth sensor: 1 / 3.5 inch CMOS
RGB sensor: 1/3 inch CMOS
IMU: Bosch
Viewing angle: 60° (H) × 45 ° (V)
Depth Resolution: 224x172(38k)
RGB Resolution: 2688 x 1520
Detection accuracy: �?% of distance (0.5m-4m @5fps) & �?% of distance (0.1m-1m @45fps)
Detection range: 0.1m-4m
Frame rate: 5-45fps





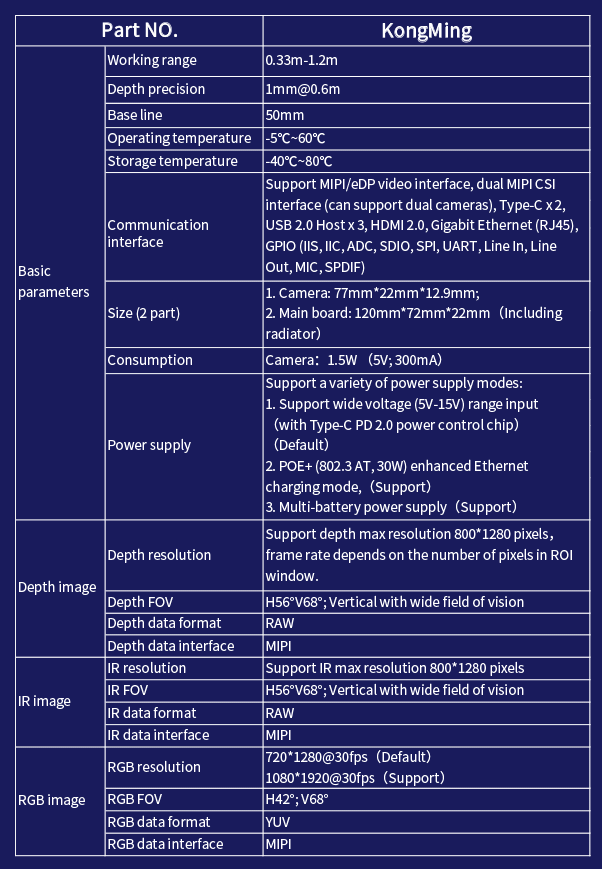
Product Features
Depth image Support depth max resolution 800*1280 pixels
RGB image RGB Suppoerts WDR 1920x1080 pixels and performs excellent in dark light, strong light and back light codition
IR/Depth Support IR image depth image
Working Range 0.33m-1.2m
Depth Precision 1mm@0.6m
Depth FOV H560° V68° Maximum use of visual field for facial proportions
3D Face Detection Support ROI
Operationg Temperature -5°C~60°C
Storage Temperature -40°C~80°C
System Linux (Default); Android(Support)
Power Supply Support wide voltage rabge(5V-15V) input and multiple power supply modes
Interface Variety of hardware interface and easy to use.
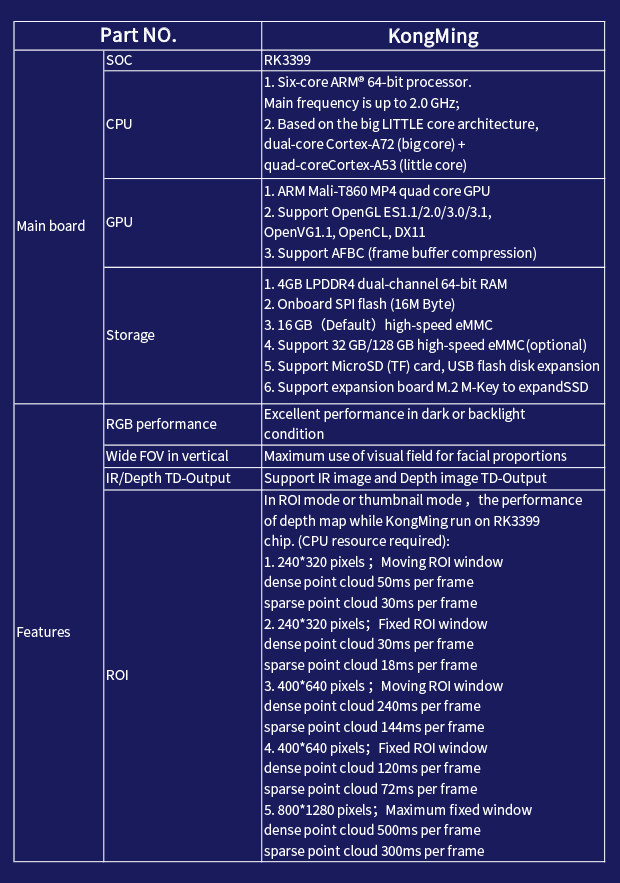
Specification

Security & Monitoring

Fast 3D Face Modeling Data Collection

Payment Equipment by Face Recognition
